サーボモーター(FS90)
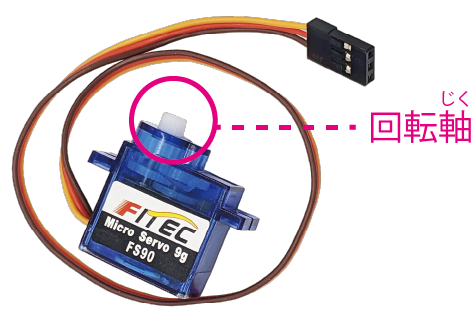 |
車のおもちゃに使われているようなモーターは電池をつなげるとぐるぐると回転しますが、サーボモーターは micro:bit から命令をもらって初めて回転するモーターです。指定した向きに回転軸を動かすことができます。 |
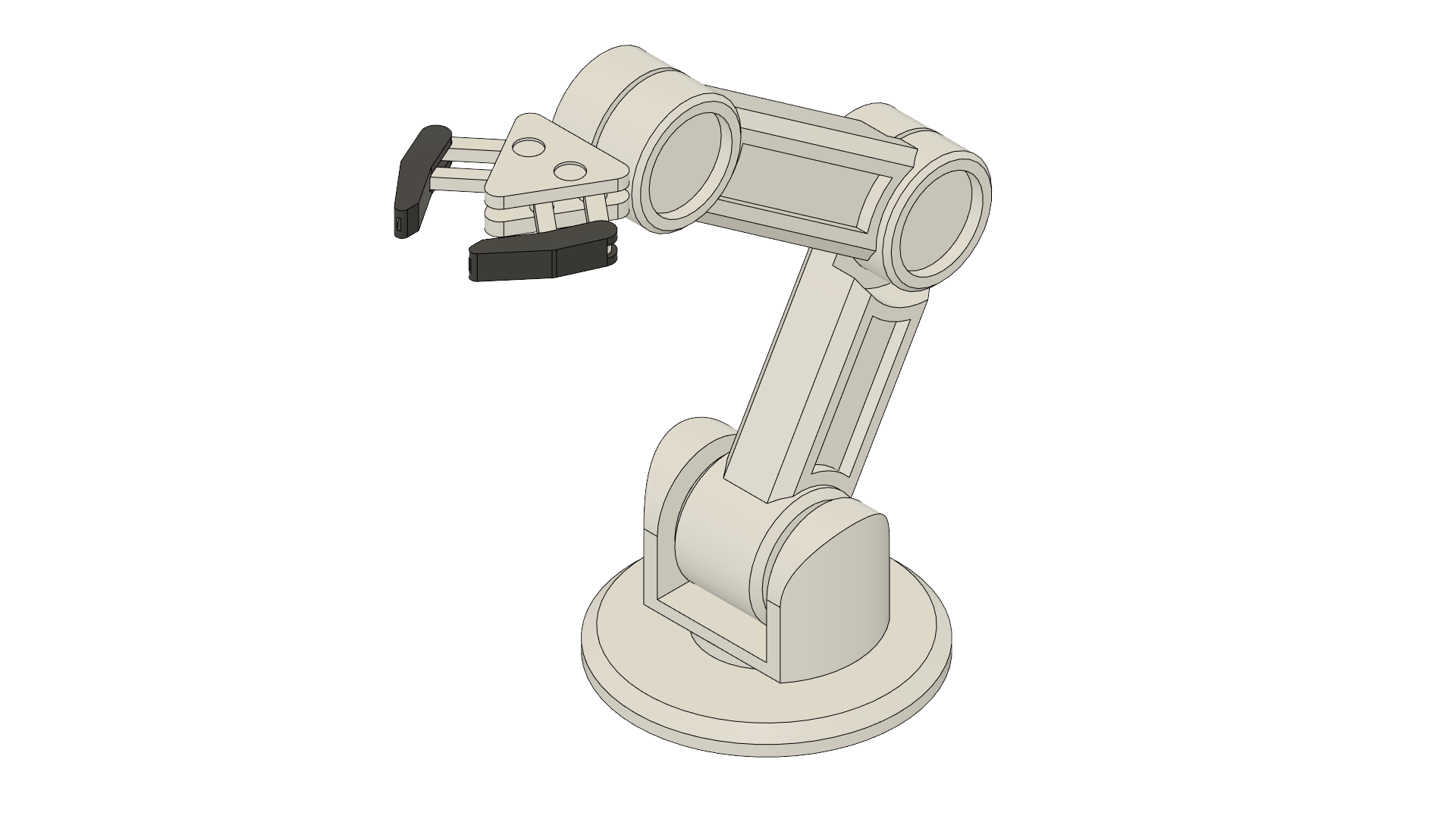 |
たとえば、ロボットの腕のような動きを再現したい場合にサーボモーターを使うと、かんたんに作ることができます。 |
このページでは、サーボモーターの基本的な使い方を学ぶことができます。
目次
サーボホーン
サーボモーターを使うときは、付属のサーボホーンという部品を軸に取りつけます。動かしたいモノはサーボホーンに取りつけます。

いろいろな形をしたサーボホーンが入っています。利用シーンに合わせて使いやすい形をえらびましょう。
サーボホーン側の凹凸と回転軸の凹凸がかみあうように取りつけます。
サーボホーンをしっかり固定したい場合は、一緒に入っている小ネジで固定しましょう。※2種類のネジが入っています、小さい方のネジを使いましょう。
micro:bit との接続方法
ワークショップモジュールを使って接続しましょう。
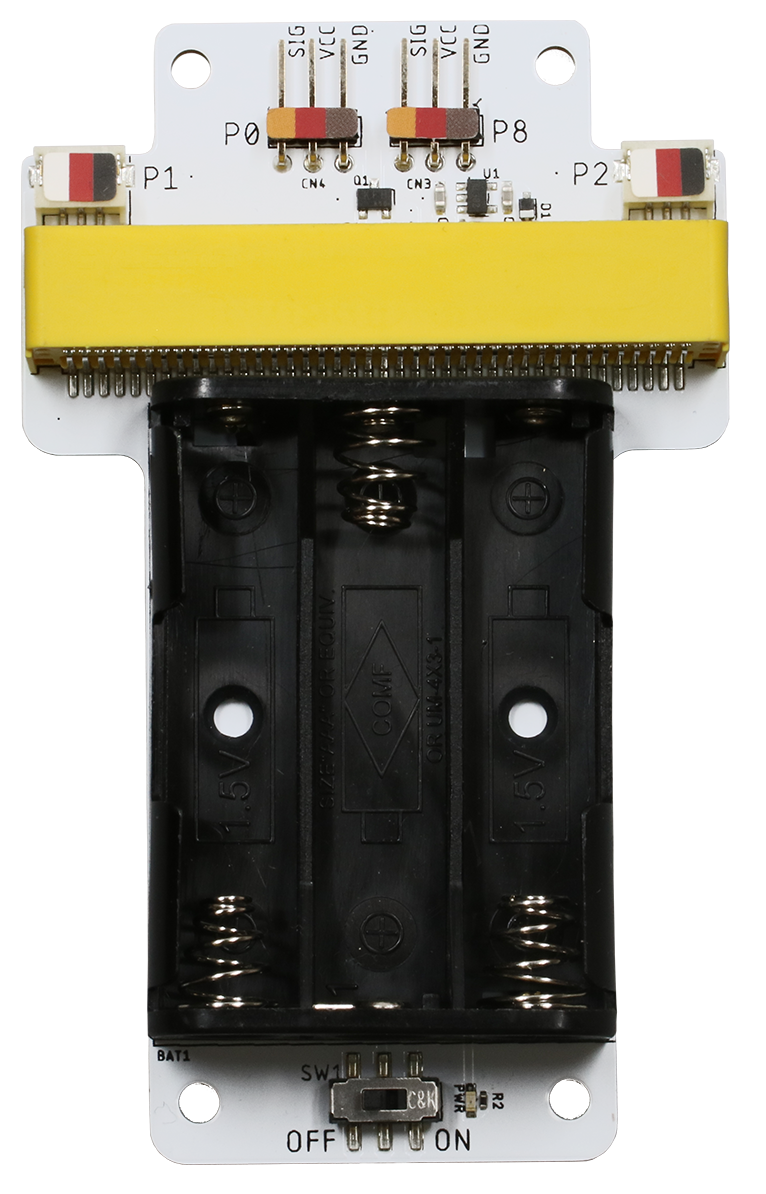 |
・接続の仕方はこちら ・商品ページはこちら |
プログラミング(MakeCode)
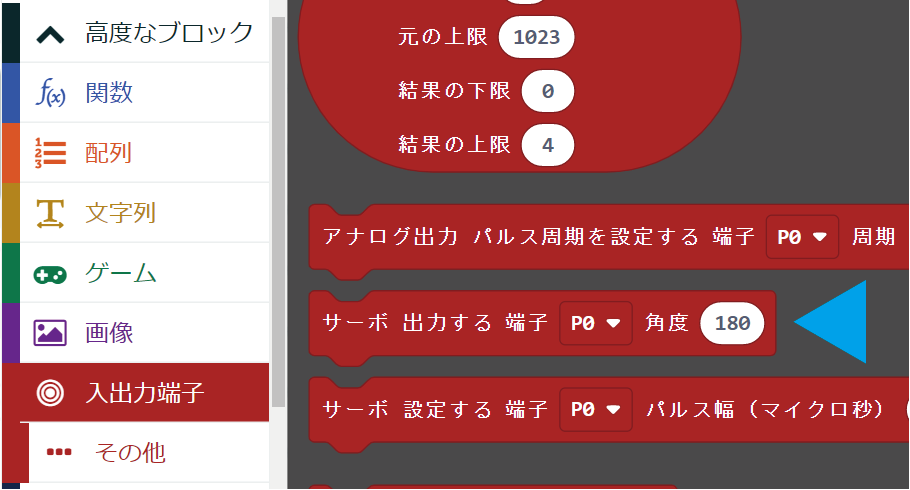
ツールボックス「高度なブロック」>「入出力端子」の中にある「サーボ 出力する」ブロックを使います。

「端子」にはサーボモーターを接続している micro:bit のピン番号を、「角度」には 0 から 180 の数値を入力します。
「角度」の数値で、回転軸の向きを指定します。
サーボホーンの取りつけ方
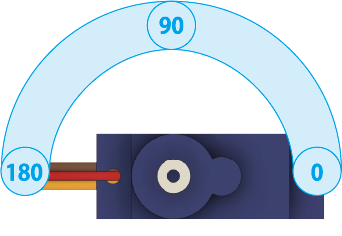
サーボモーター(FS90)は 180° の範囲で動きます。サーボホーンは好きな向きにつけることができてしまうので、取りつけたときの角度を知っておくとプログラミングしやすくなります。
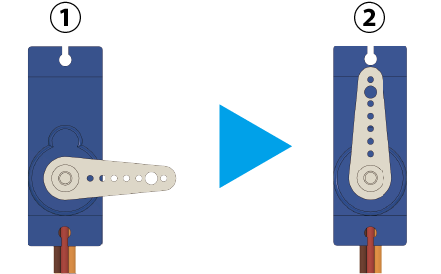
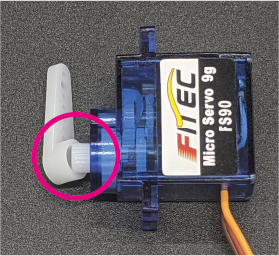
例えば、①から②の状態にサーボホーンを動かしたいとき
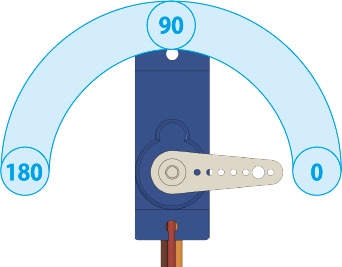
角度「0」のときに①のようにサーボホーンを取りつけた場合、角度を「90」にプログラムすれば②の状態になります。
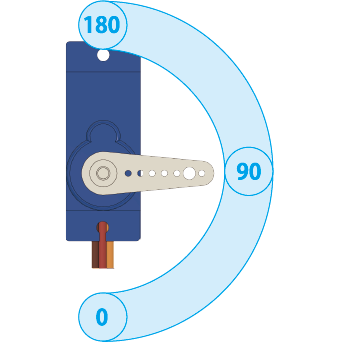
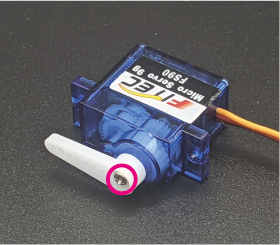
角度「90」のときに取りつけた場合、②の状態にするには角度を「180」にプログラムします。
練習
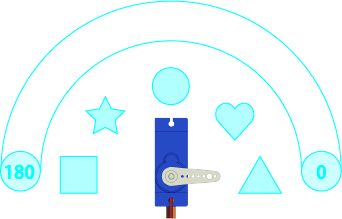
角度「0」のときに図の状態になるようにサーボホーンをつけ、ボタンを押したら好きなマークの方向をむくようなプログラムを作ってみましょう。
このプログラムをもとに角度「180」の部分を 0 ~ 180 の数字に変えて、サーボホーンの動きを観察しましょう。
※ micro:bit に電源を入れた直後、角度「0」の方向に回転軸が動きます(「最初だけ」ブロック内の命令が実行されます)。
※端子「P0」部分は、自分がサーボモーターを接続しているピン番号を設定してください。
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
豆知識:サーボモーターの仕組み
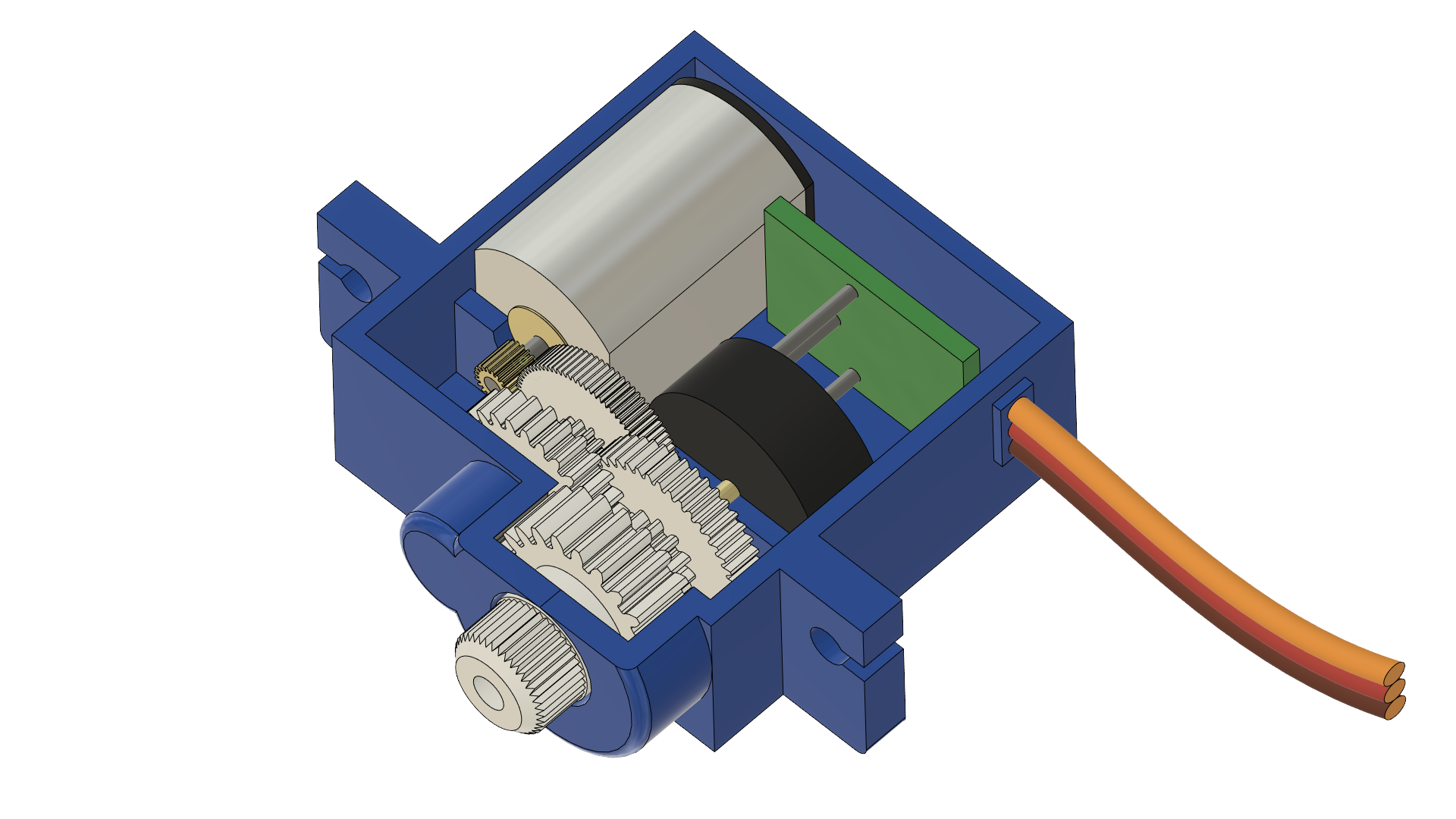
サーボモーターの中には DCモーター・基板・角度を調べるセンサーが入っています。目標の角度命令を受け取ると、今の角度をセンサーで調べながら目標の角度になるまでモーターを回転させます。
サーボモーターを使った作品
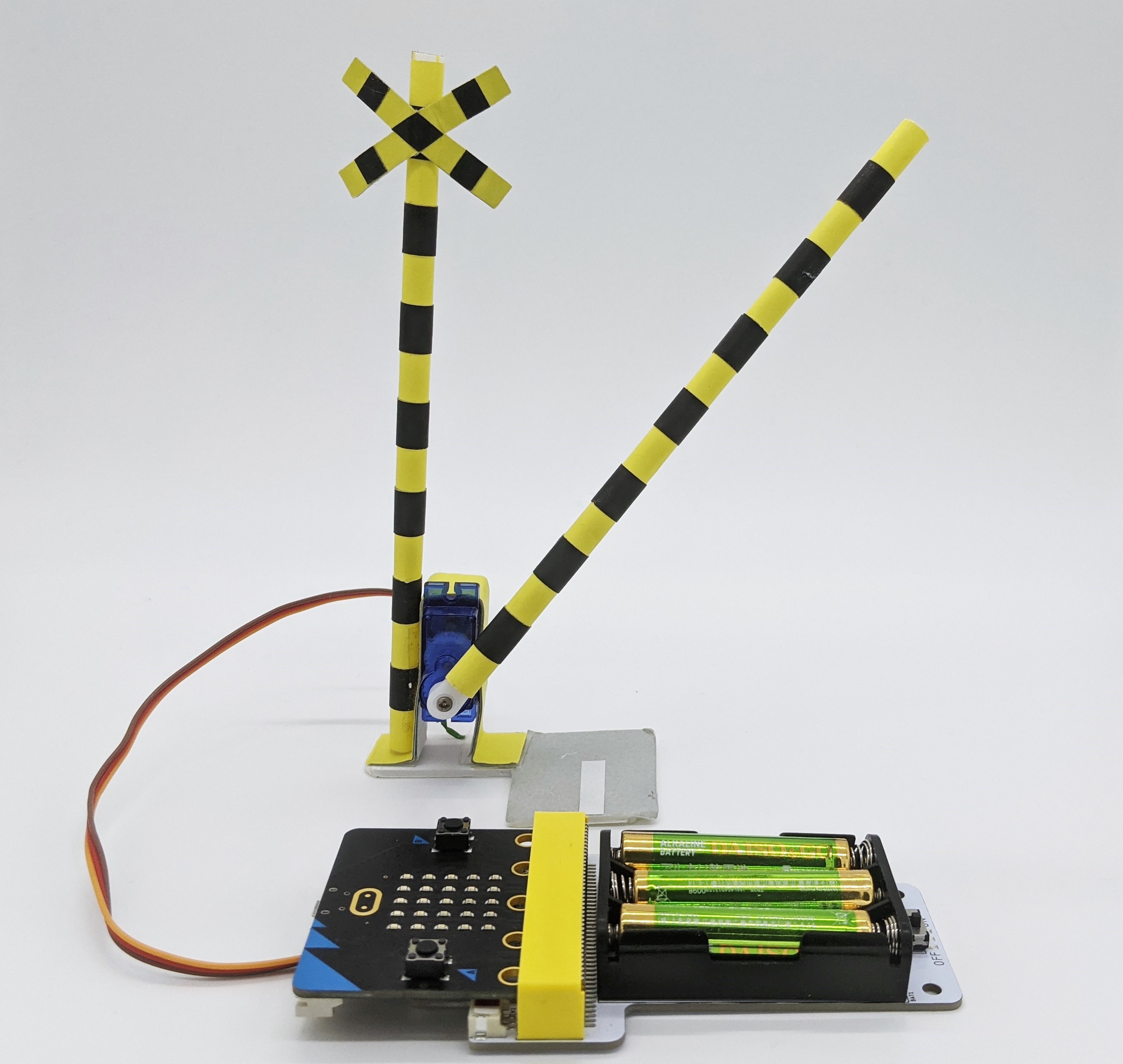 |
踏切 厚紙や色紙、ストローを使って遮断棒を再現しましょう。 |
 |
しゃくとり虫 ボディを曲げる → 伸ばす をくり返して前進します。 |
 |
ねこみみ サーボモーターを 2 つ使って、耳を動かします。 |