micro:bit用ロボットベース(接触スイッチ)
 |
DCモーター2個を使って動かす車です。
バンパースイッチを2個搭載しているので、例えば、衝突を検知できる自走ロボットを作ることができます。 組立済み商品なので、ご購入後にすぐ使えます。 |
乾電池といった直流電源(電流の大きさが一定で、流れる方向も一方向である電源)で動くモーター。一方で、コンセント電源といった交流電源(電気の大きさや流れる方向が周期的に変化する電源)で動くモーターはACモーターといいます。
 中にスイッチが組み込まれていて、何かに押されたらスイッチが ON になります。お掃除ロボットによく搭載されている仕組みです。
中にスイッチが組み込まれていて、何かに押されたらスイッチが ON になります。お掃除ロボットによく搭載されている仕組みです。
このページでは、「micro:bitロボットベース(接触スイッチ)」の基本的な使い方を学ぶことができます。
目次
micro:bit との接続方法

画像のように、つけてください。

スイッチを ON にすると micro:bit に電源が入り、書き込んだプログラムが動きます。電源が入ると、スイッチ真下部分にあるLEDが赤く光ります。
使い方
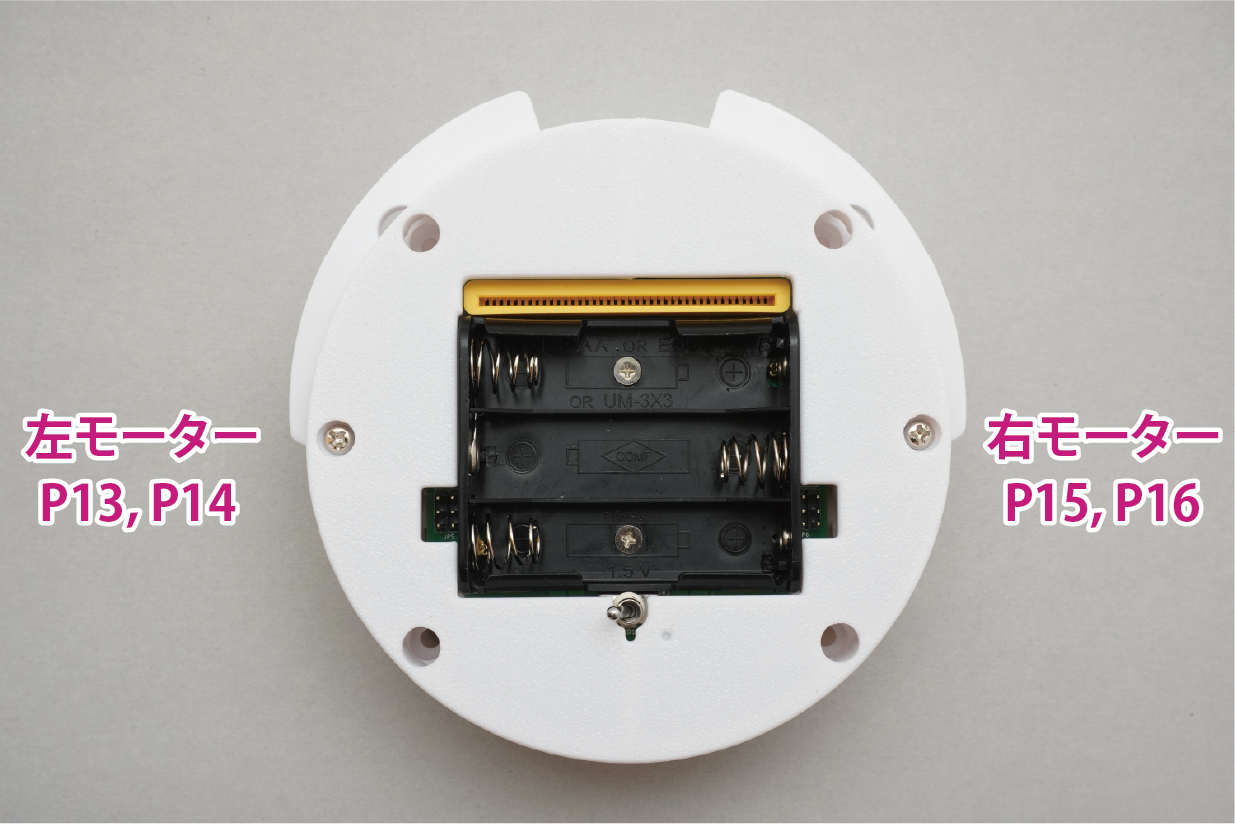
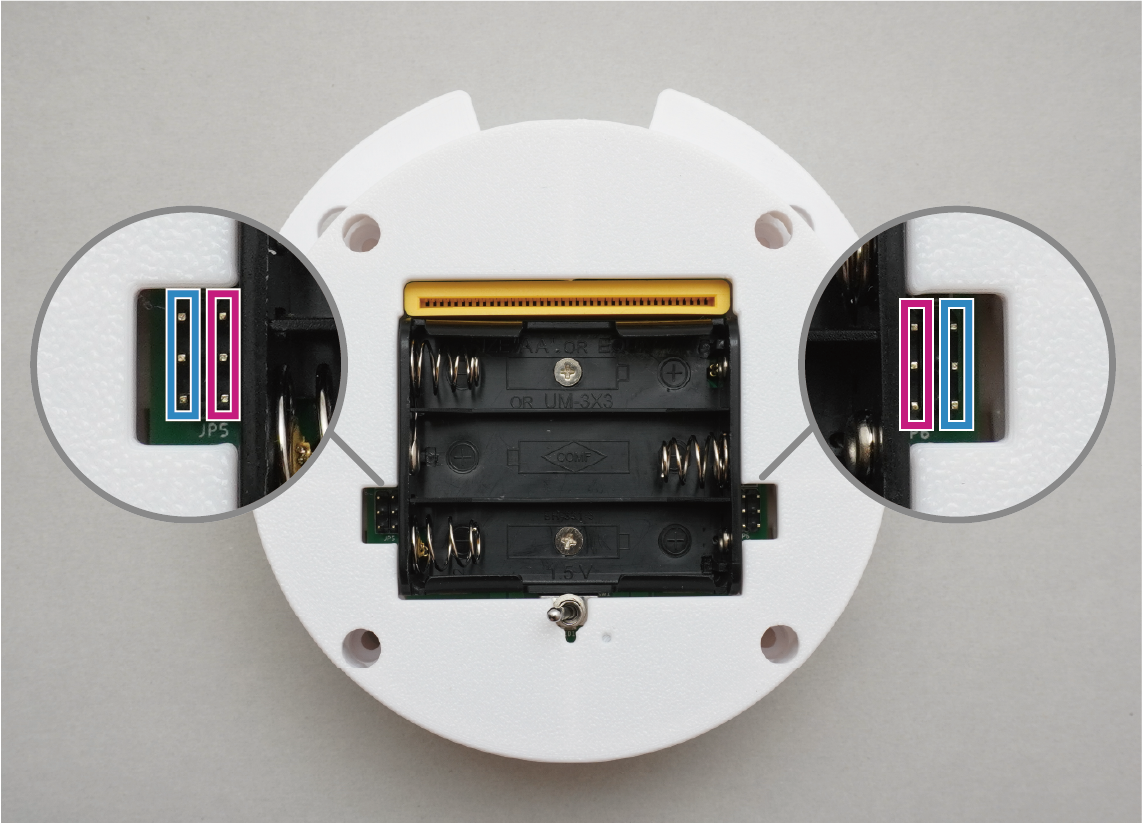
画像左側のモーターは micro:bit の P13、P14 に、右側のモーターは P15、P16 の端子につながっています。
回転スピードと回転方向を指定して動かします。
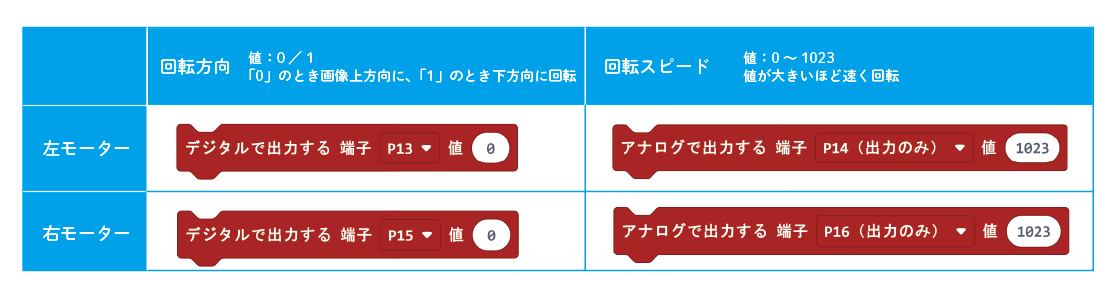
※各ブロックは、ツールボックス「高度なブロック」>「入出力端子」にあります。
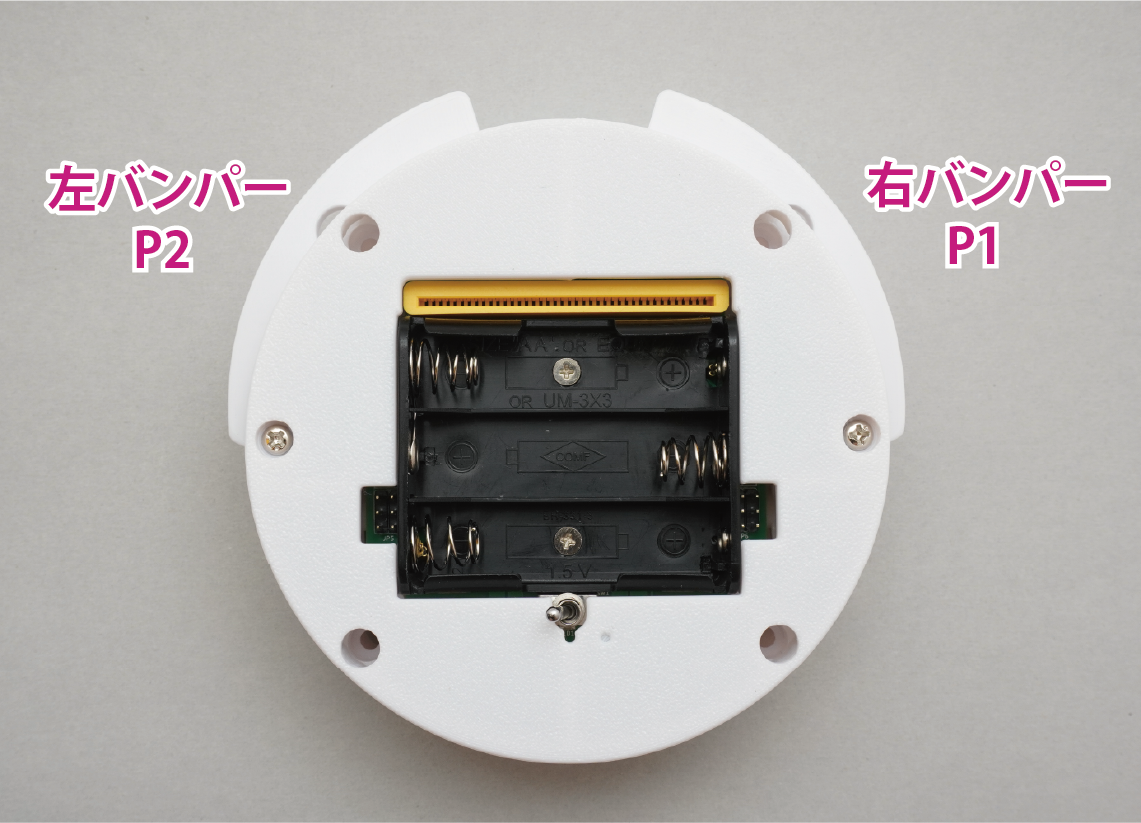
画像左側のバンパーは micro:bit の P2 に、右側のバンパーは P1 の端子につながっています。
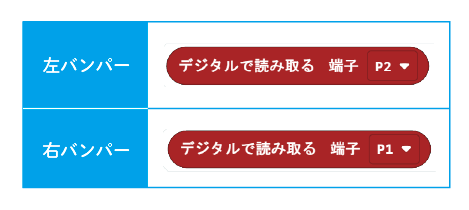
読み取った値が「0」のときスイッチON(押されている状態)、「1」のときスイッチOFF(押されていない状態)となります。
※ブロックは、ツールボックス「高度なブロック」>「入出力端子」にあります。
4つのピンには、サーボ・LED系のパーツを接続することができます。
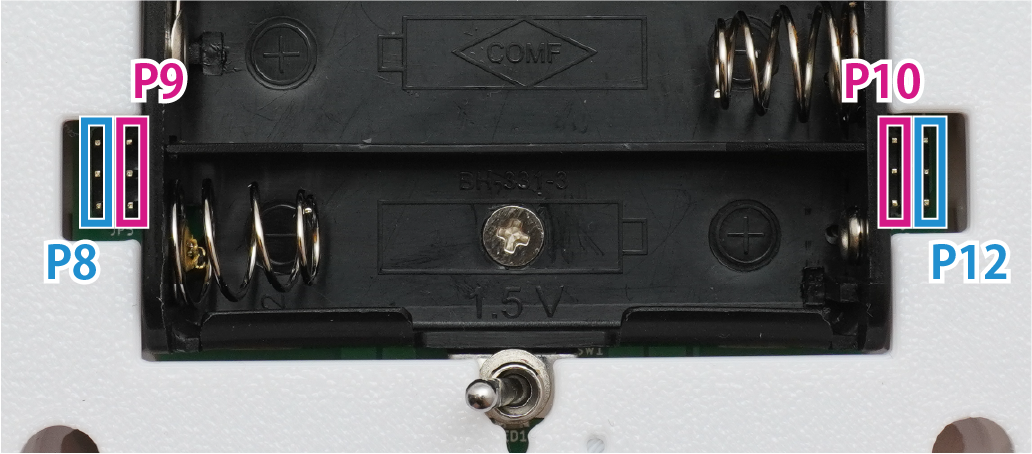
左から、micro:bit の P8、P9、P10、P12 の端子につながります。

パーツを接続するときは向きに注意してください。パーツのコードの色の並びが図と同じ(上から、茶・赤・オレンジ)になるようにつなげてください。
プログラミング(MakeCode)
micro:bitのボタンAを押したら右モーターが1秒回転、ボタンBを押したら左モーターが1秒回転するプログラムです。
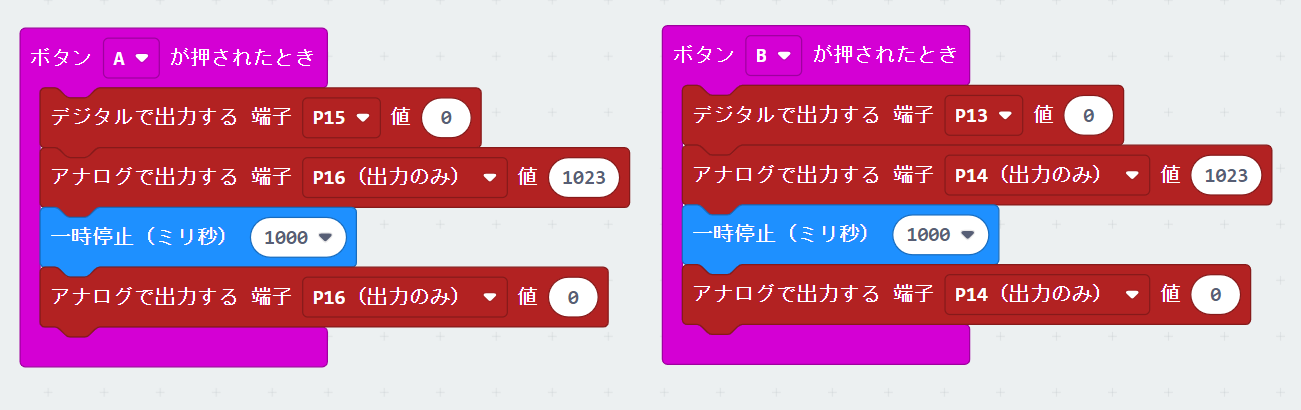
プログラムURL:https://makecode.microbit.org/_Ud27bVia53sx
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
バンパーを押したらアイコンが表示されるプログラムです。
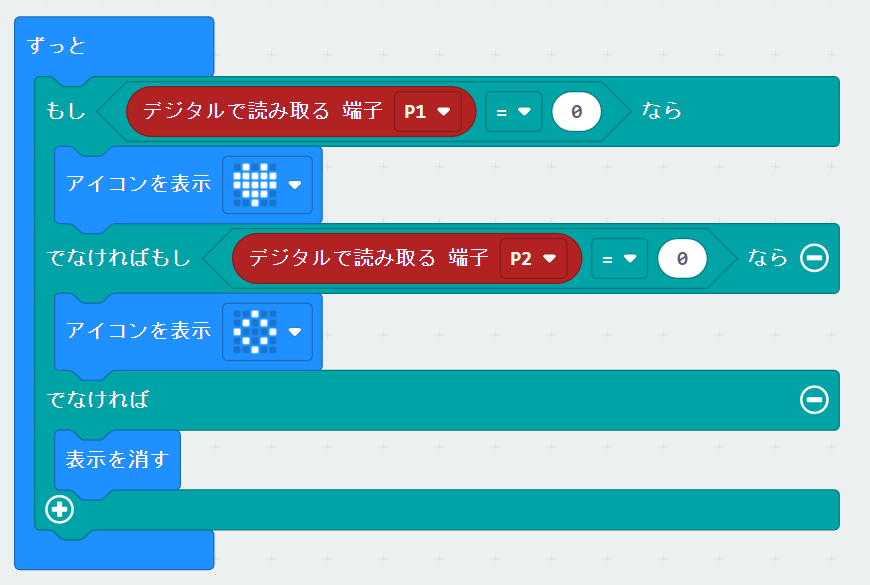
プログラムURL:https://makecode.microbit.org/_iE2DV04ds3p7
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
バンパーが押されているかどうか(端子のデジタル値)で動作を分けています。
このように、条件を指定して、条件を満たす場合/満たさない場合で動作を分けるプログラムを条件判断といいます。 「条件判断」のプログラムを初めて作る人は、チュートリアルも確認してみましょう。