回転サーボモーター(FS90R)
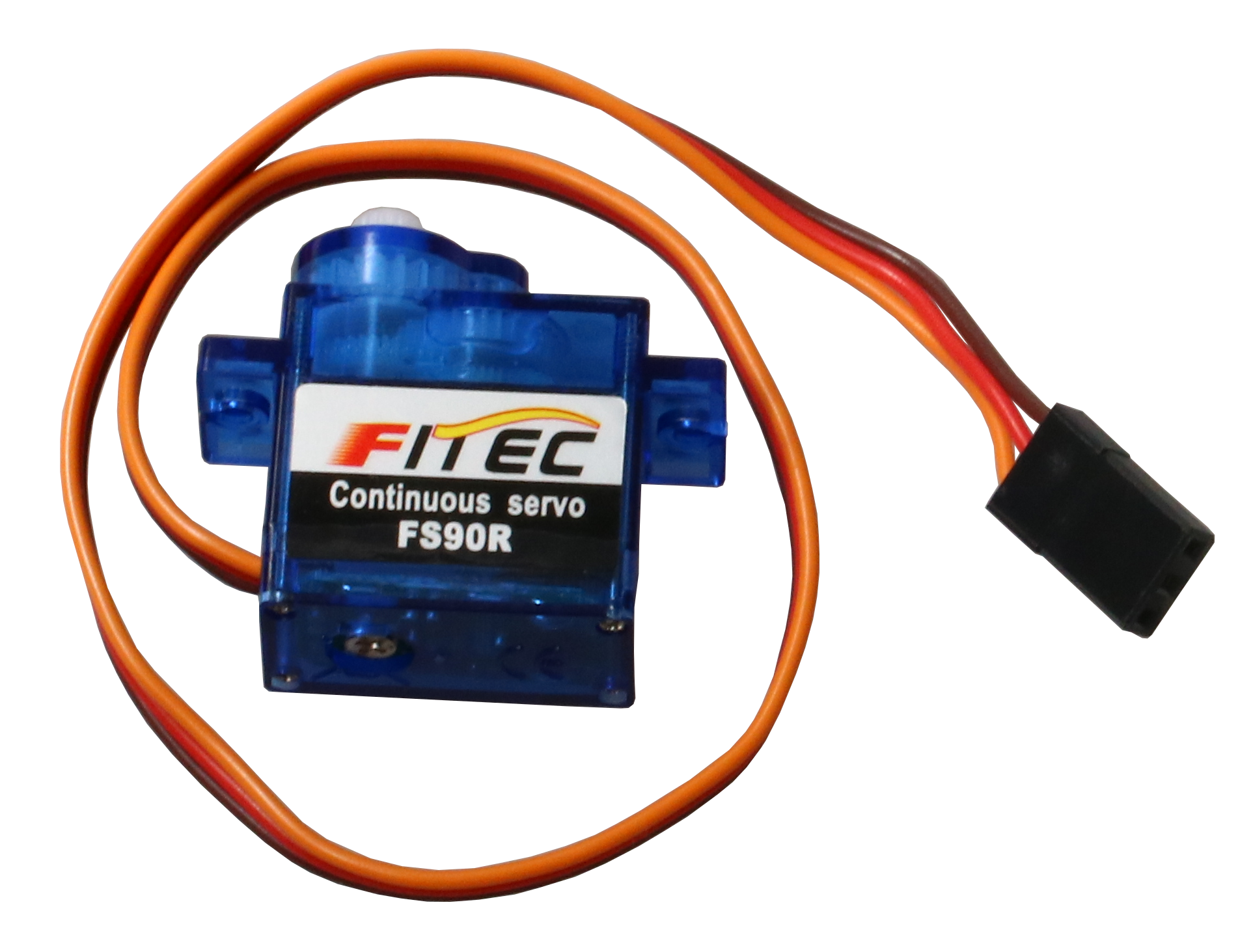 |
回転サーボモーターはサーボモーターの仲間ですが、ぐるぐると何回転もできる特別なサーボモーターです。タイヤのように動くものを作りたい場合に使います。 |
このページでは、回転サーボモーターの基本的な使い方を学ぶことができます。
目次
サーボホーン
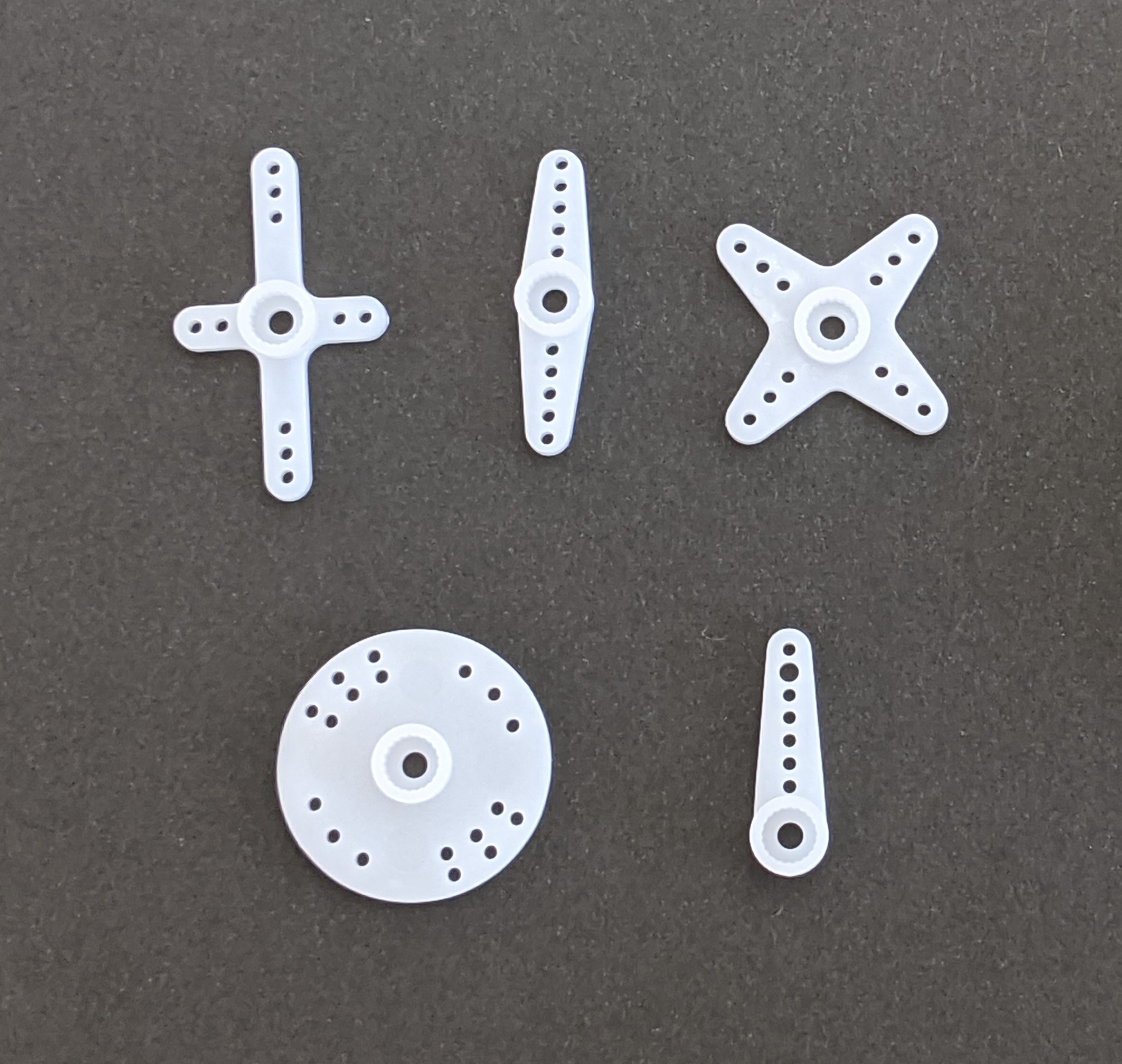
回転サーボモーターを使うときは、付属のサーボホーンという部品を軸に取りつけて使います。動かしたいモノはサーボホーンに取りつけます。
いろいろな形をしたサーボホーンが入っているので、利用シーンに合わせて使いやすい形をえらびましょう。

タイヤとして使う場合は専用のタイヤパーツが便利です。スイッチエデュケーションが販売している回転サーボモーターセットには左図のタイヤも入っています。

サーボホーン側の凹凸と回転軸の凹凸がかみあうように取りつけます。
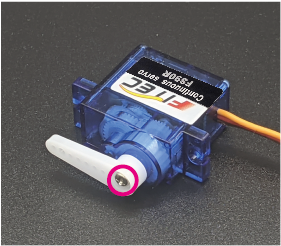
サーボホーンをしっかり固定したい場合は、一緒に入っている小ネジで固定しましょう。※2種類のネジが入っています、小さい方のネジを使いましょう。
micro:bit との接続方法
ワークショップモジュールを使って接続しましょう。
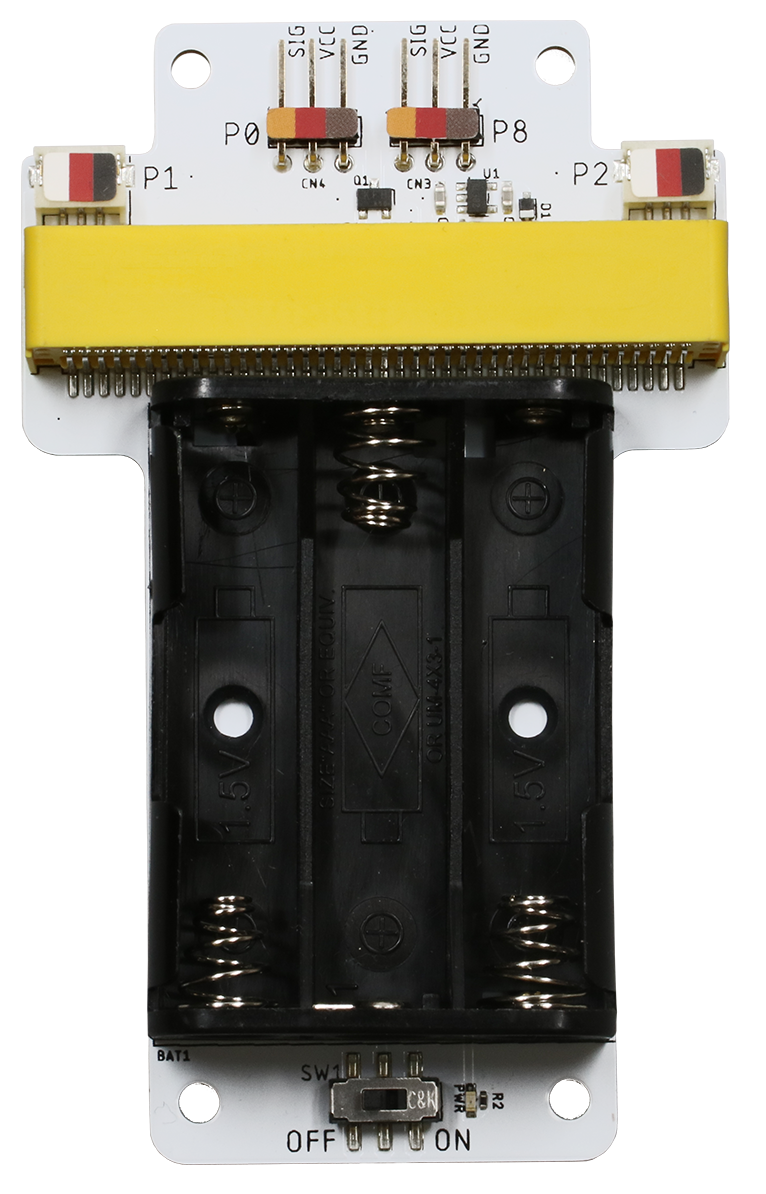 |
・接続の仕方はこちら ・商品ページはこちら |
プログラミング(MakeCode)
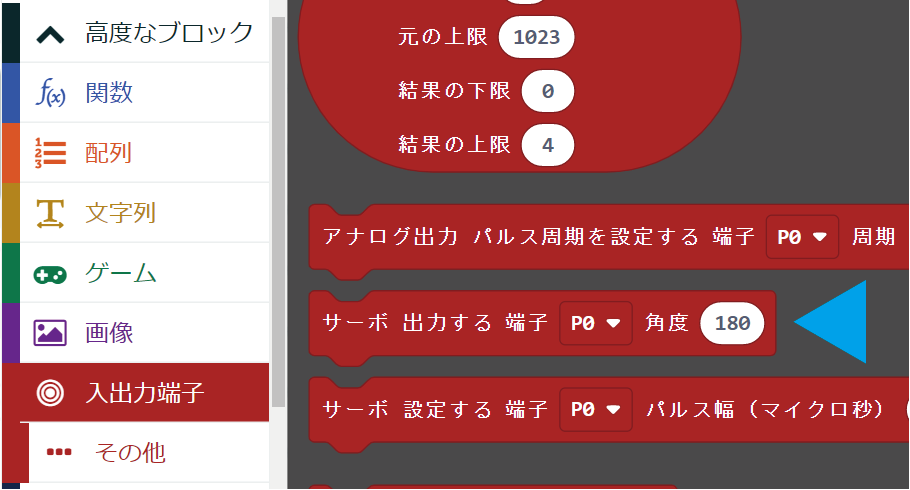
ツールボックス「高度なブロック」>「入出力端子」の中にある「サーボ 出力する」ブロックを使います。

「端子」には回転サーボモーターを接続している micro:bit のピン番号を、「角度」には 0 から 180 の数値を入力します。
「角度」の数値で、回転する「方向」と「速さ」が決まります。
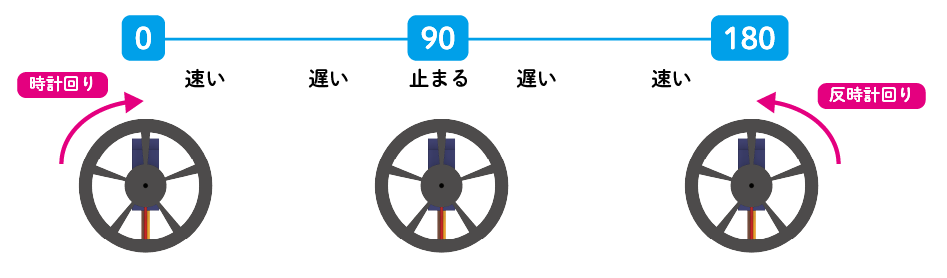
- 角度 0~89 のとき:時計回りに回転します。0に近いほど速いスピードで回転します。
- 角度 90 のとき:停止します
- 角度 91~180 のとき:反時計回りに回転します。180に近いほど速いスピードで回転します。
ボタンAを押したら時計回りに、ボタンBを押したら反時計回りに回転し、ボタンAとボタンBを同時に押したら停止するプログラムです。
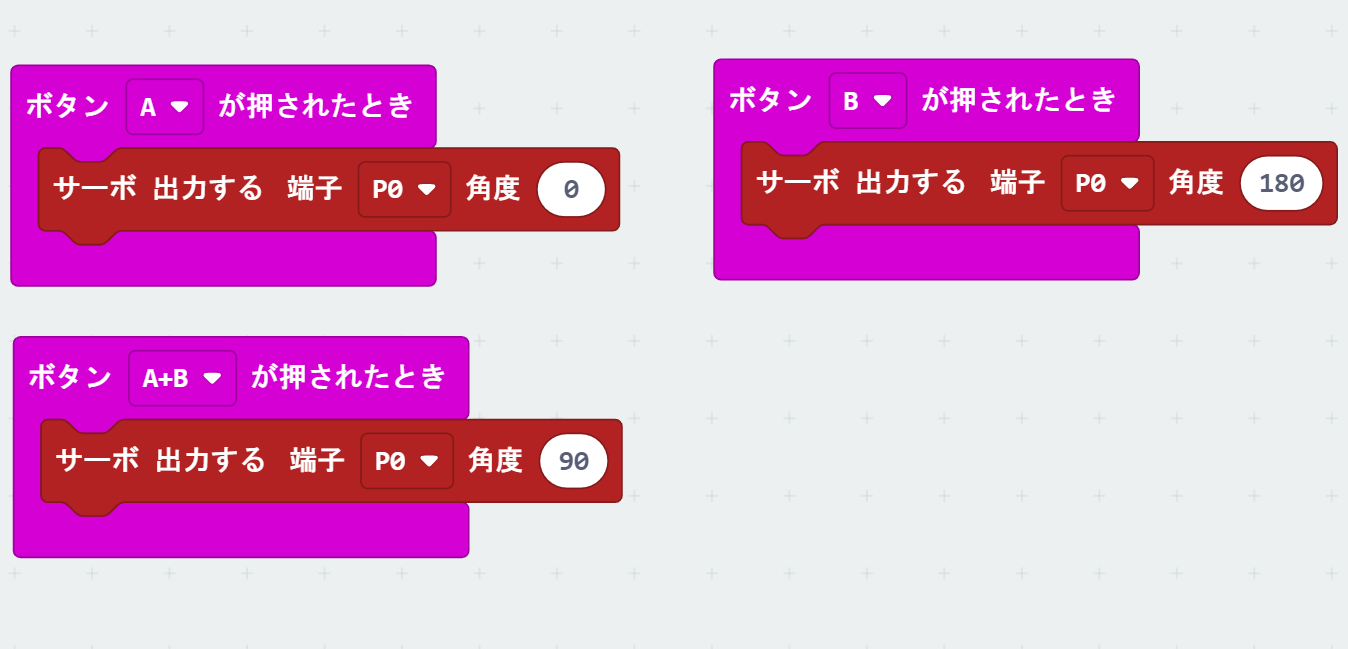
プログラムURL:https://makecode.microbit.org/_FMdJKA12b3jR
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
調整
回転サーボモーターは角度を90度に指定すると停止するようになっていますが、わずかに動いてしまう場合があります。この場合、「プログラム」で対応する方法と「回転サーボモーターのメンテナンス」で対応する方法の2つの方法があります。
プログラムで対応する場合
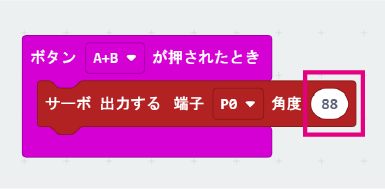
指定する角度を90前後(91、89など)に変え、実際に動きを確かめてみてください。地道な作業ですが、停止する数値をさがしましょう。
メンテナンスで対応する場合

90度で動いている状態のときに、ドライバーを使って調整トリマーを本当にほんの少しだけ回します。時計回り、反時計回りと少しずつ回して回転サーボモーターが停止したところでドライバーをはなしましょう。調整している様子:動画(YouTube)
回転サーボモーターを使った作品
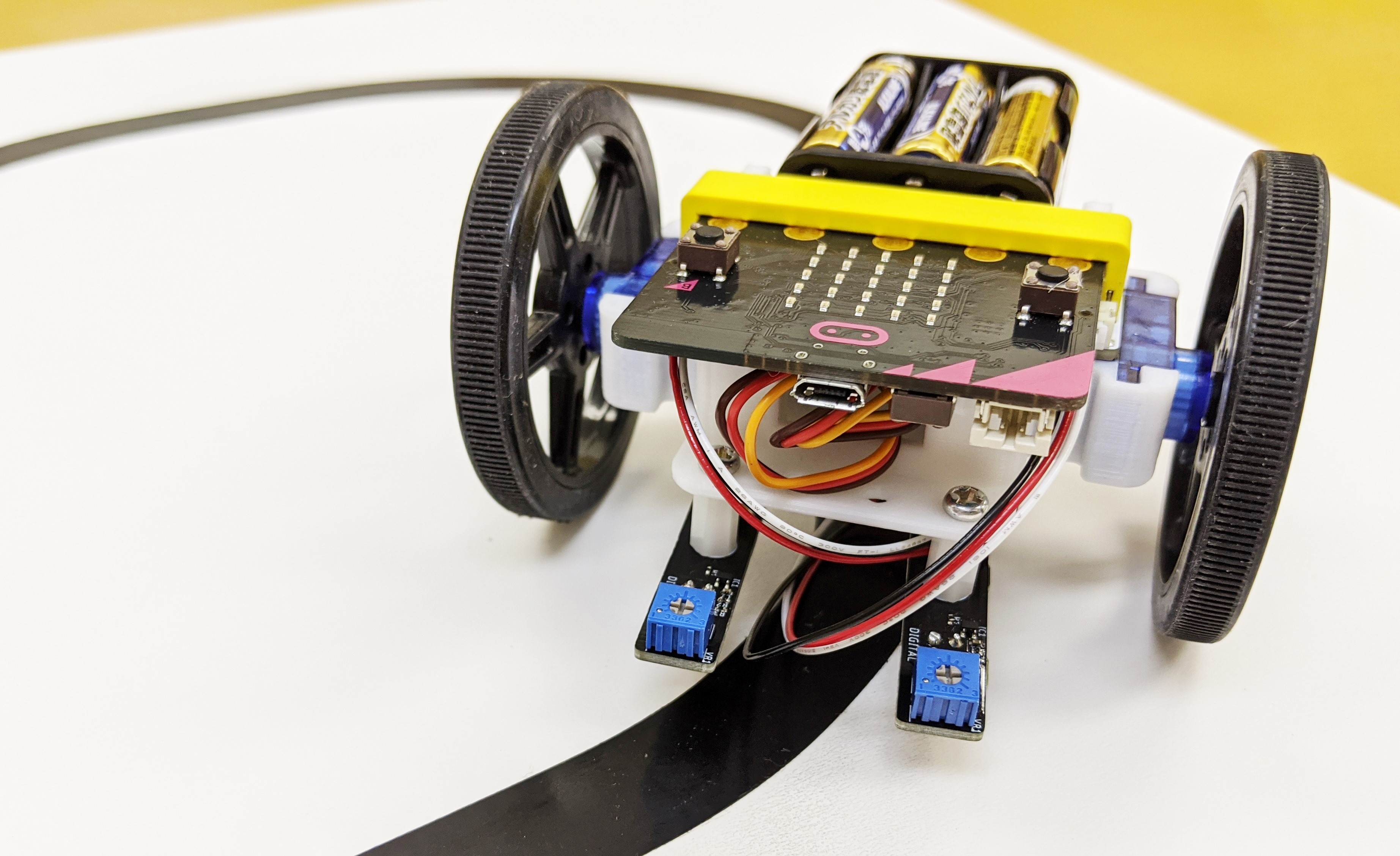 |
ライントレーサー 黒色のラインにそって自動で走るミニカー |
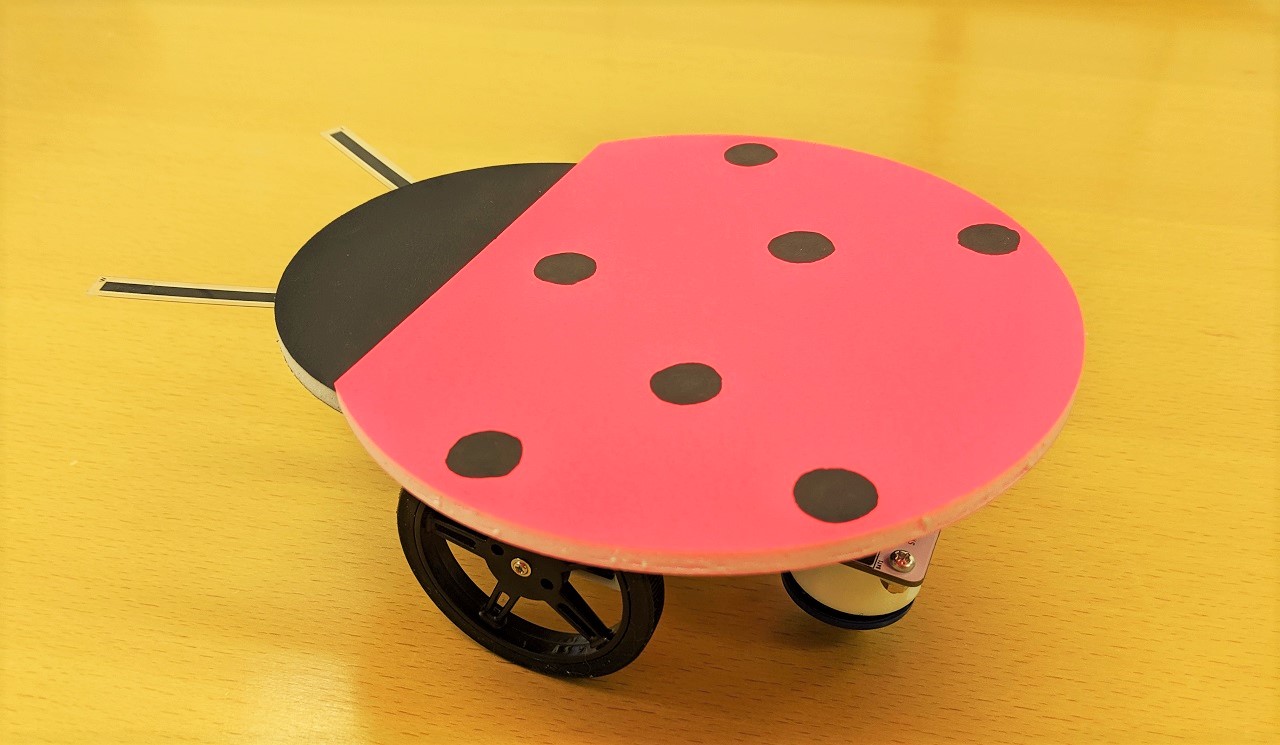 |
衝突探知機能つきミニカー 曲げセンサーで壁との衝突を検知するミニカー |
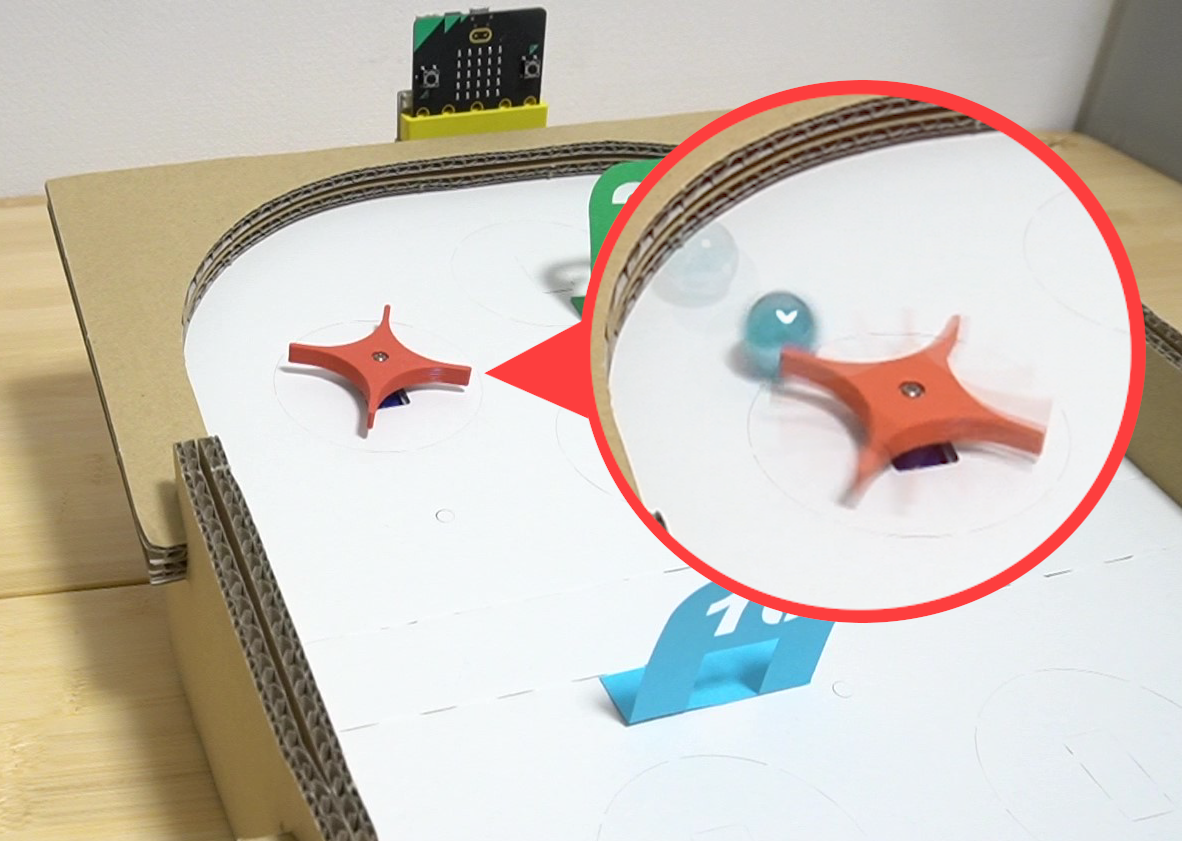 |
ピンボール with 回転サーボ くるくる回転の力でビー玉の行き先を変更!なピンボールゲーム |