距離センサー
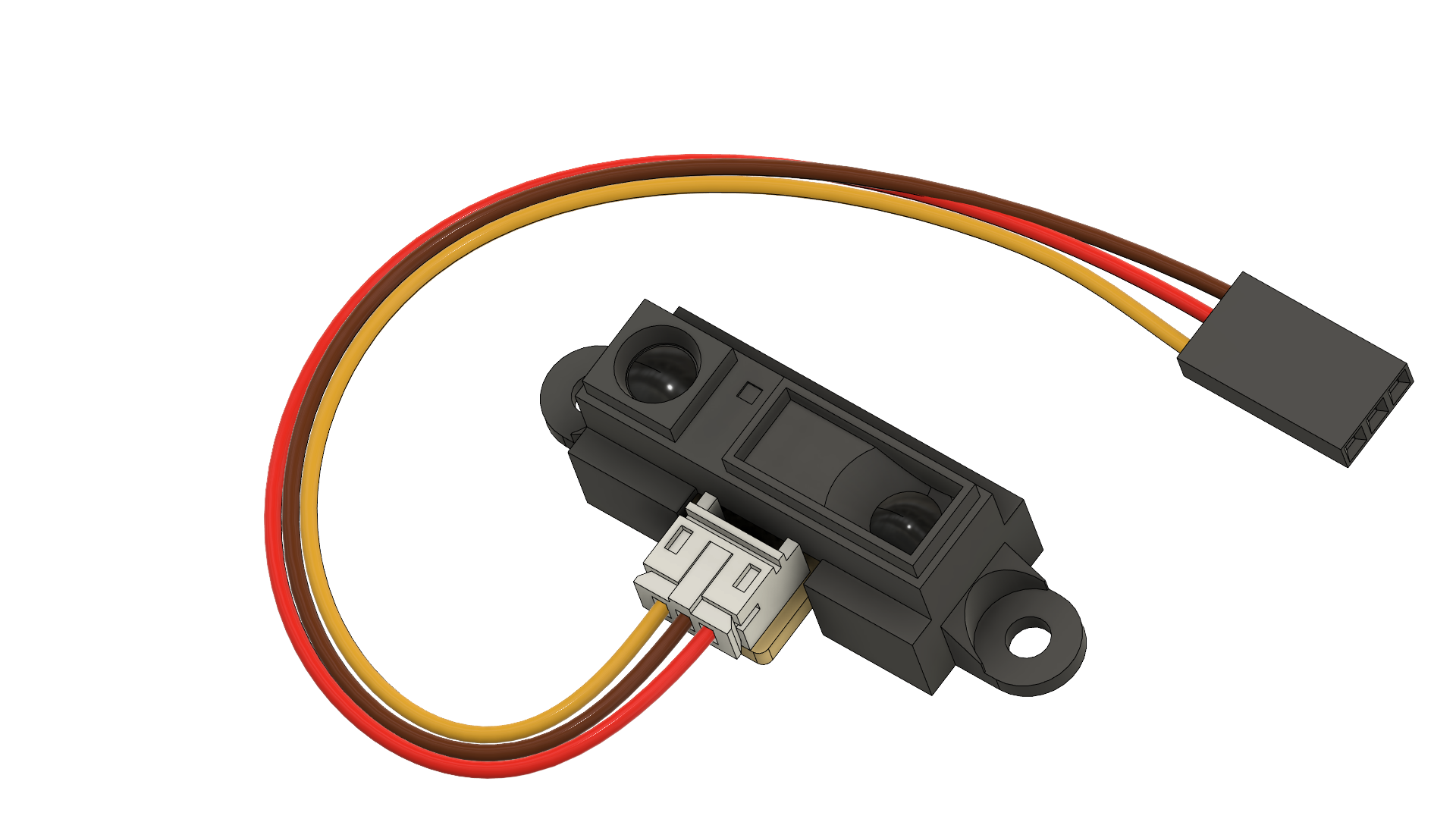 |
赤外線という、私たち人間の目には見えない光を使ったセンサーです。赤外線を発光するLEDと、光位置センサー(PSD)という素子が入っていて、センサー前方にある物体との距離を調べることができるセンサーです。 |
このページでは、距離センサー(GP2Y0A21YK0F:距離センサーデータシートPDF)の基本的な使い方を学ぶことができます。
目次
仕組み
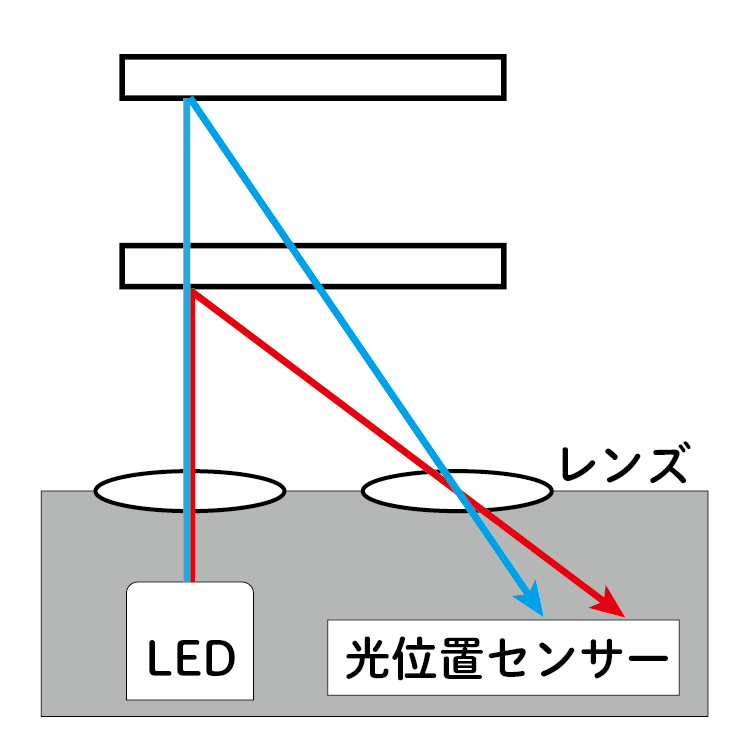
距離センサーの中には、赤外線LEDと光位置センサー(PSD)という素子が入っています。
PSDはどの位置に光が当たっているかがわかる素子です。
対象物との距離が変わると、反射した光がPSDに当たる位置が変化します。
PSDは光の当たる位置によって異なる電圧を出力するので、電圧を調べることで、対象物までの距離がわかります。
これは、距離と出力電圧の関係です。このセンサーが計測できる範囲は、10cm ~ 80cm です。
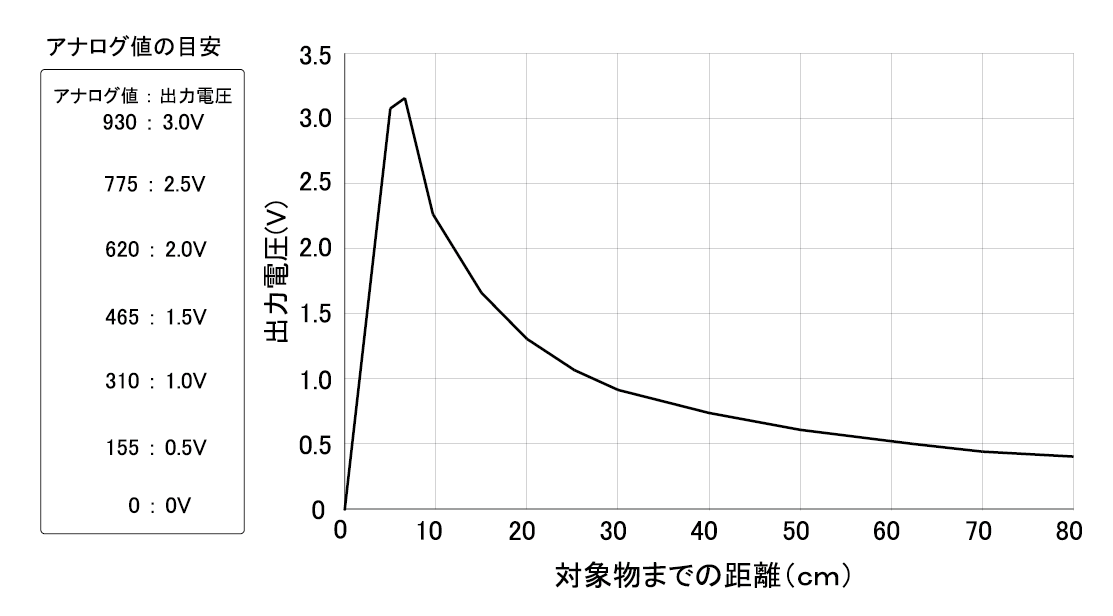
micro:bitは距離センサーの出力電圧をアナログ値として取得できます。出力電圧とアナログ値の関係は
アナログ値 = 出力電圧 × 1023 ÷ 3.3
となります。
太陽光などがPSDに入ったり、対象物の素材や位置・姿勢によっては正しく距離が測れないことがあります。
動作がおかしいと感じた場合は、これらを確認しましょう。
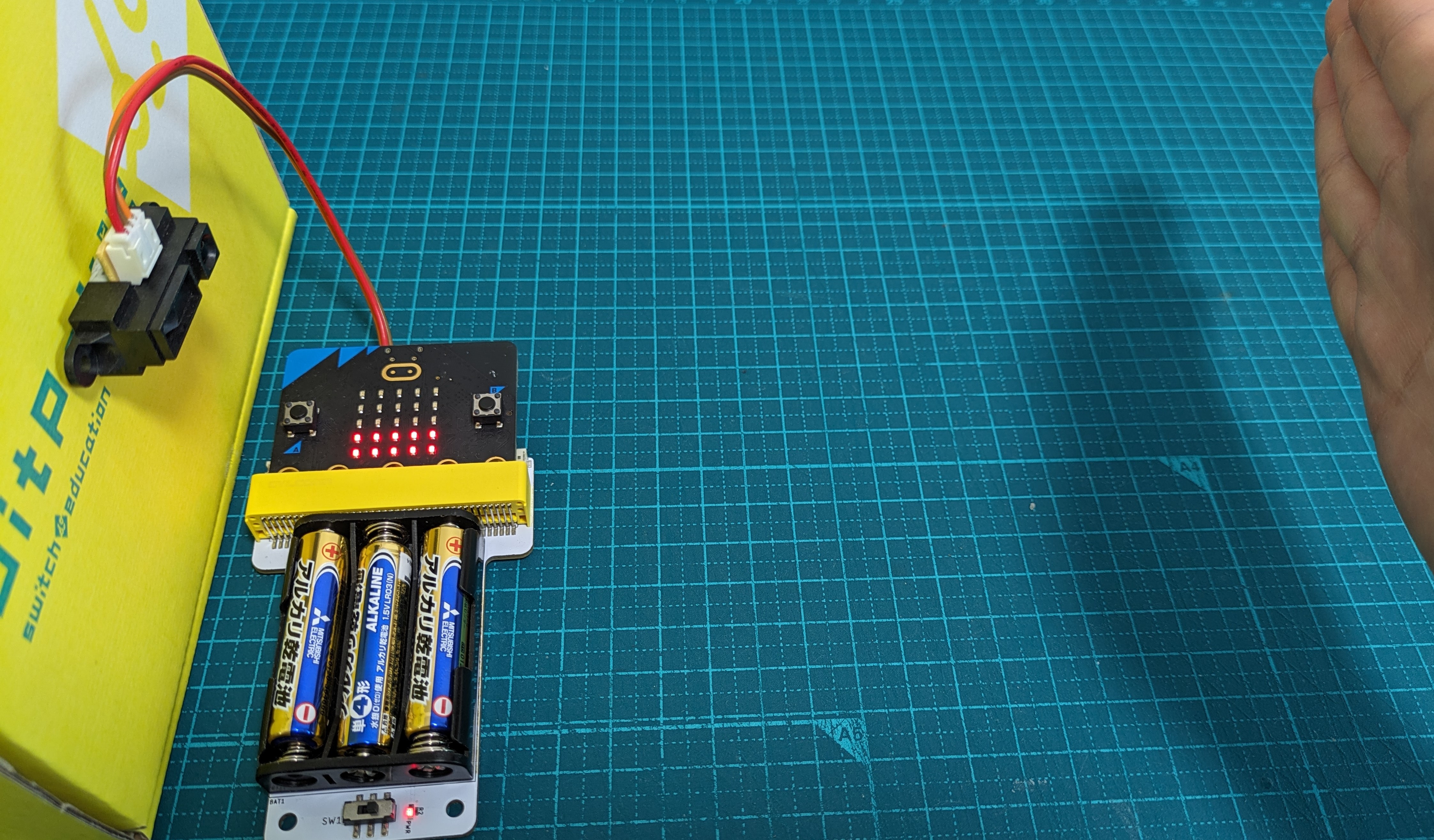
micro:bit との接続方法
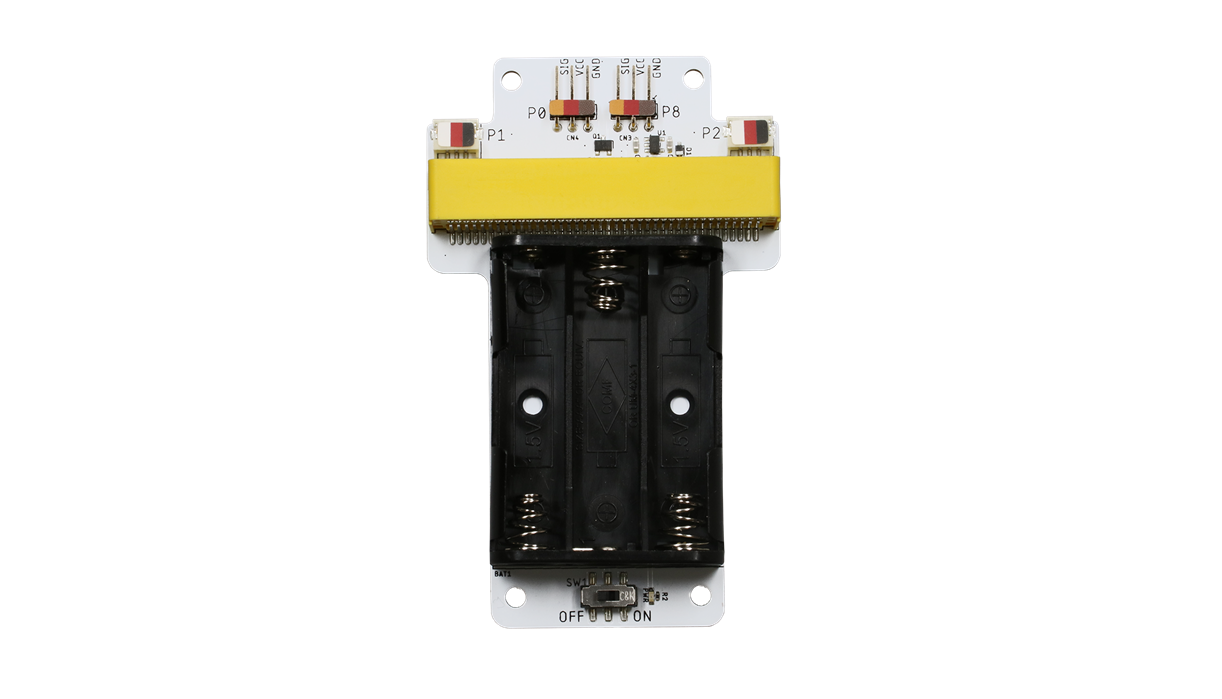
距離センサーにつながっているコードのコネクターを、ワークショップモジュールに接続して使います。
・接続の仕方はこちら
・商品ページはこちら
プログラミング(MakeCode)
まずは、センサーの前に手をかざすなどして、距離とアナログ値の変化を確認してみましょう。

アナログ値の取得は、ツールボックス「高度なブロック」>「入出力端子」の中にある「アナログで読み取る」ブロックを使います。
「端子」にはフォトインタラプタ―を接続している micro:bit のピン番号を選びます。
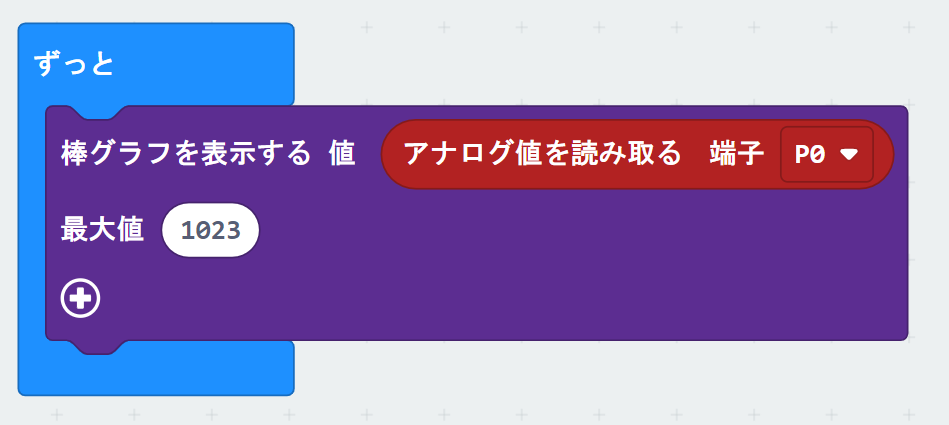
距離センサーの値を棒グラフでLED画面に表示するプログラムを動かしてみましょう。手がセンサーに近くなるほどLEDがたくさん点灯し、遠くなるほど少なくなります。※「棒グラフを表示する…」ブロックは、ツールボックス「LED」にあります。
プログラムURL:https://makecode.microbit.org/_JYfWYxh5301x
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
※ワークショップモジュールの電源スイッチをONにすることを忘れないようにしましょう。
 「棒グラフを表示する」ブロックを使うと、おおまかな値をLED画面で確認することができます。
「棒グラフを表示する」ブロックを使うと、おおまかな値をLED画面で確認することができます。
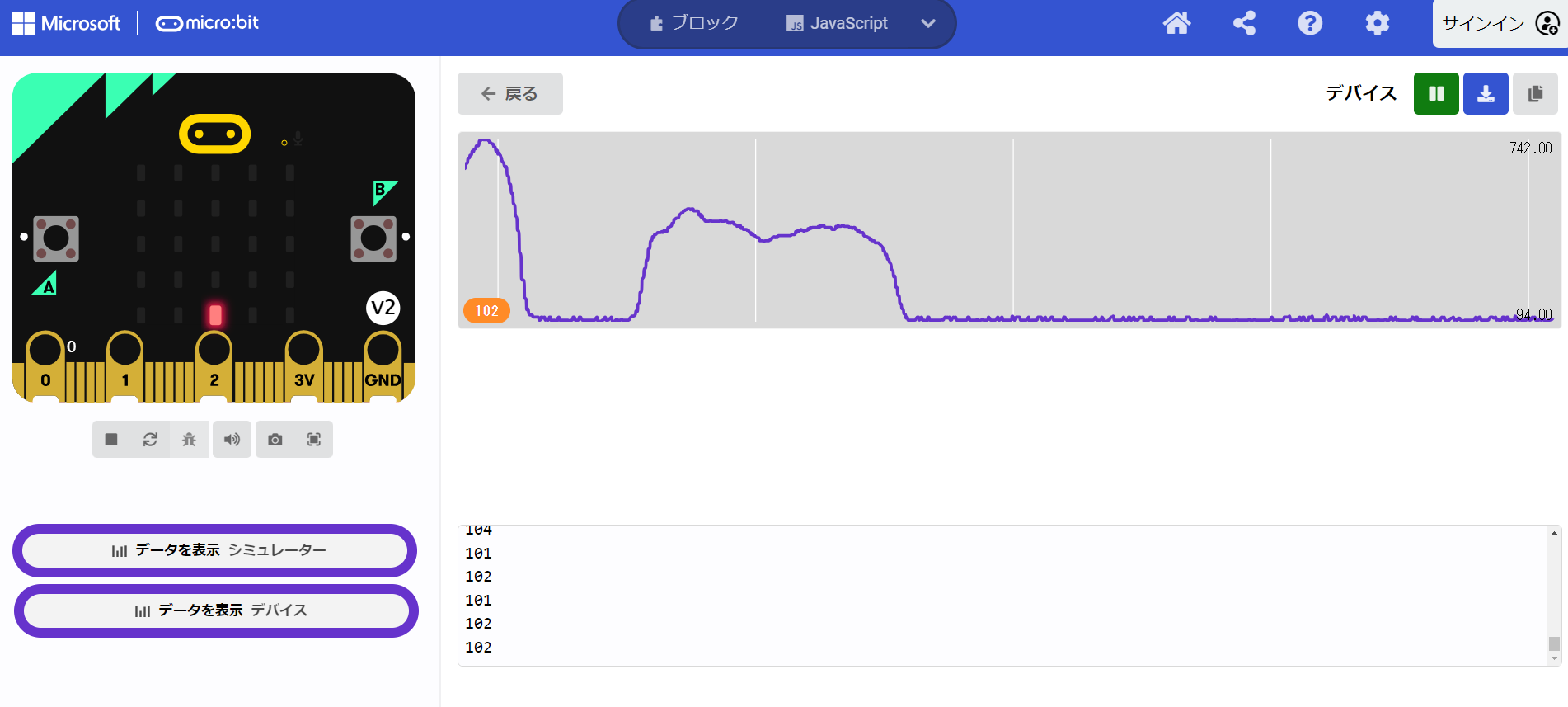 また、センサーの値をリアルタイムにグラフで確認することもできて便利です。※グラフを表示するには、micro:bit をケーブルでパソコンに接続している必要があります。
また、センサーの値をリアルタイムにグラフで確認することもできて便利です。※グラフを表示するには、micro:bit をケーブルでパソコンに接続している必要があります。
グラフの表示方法など「棒グラフに表示する…」ブロックの使い方は、チュートリアルを参考にしてください:こちら
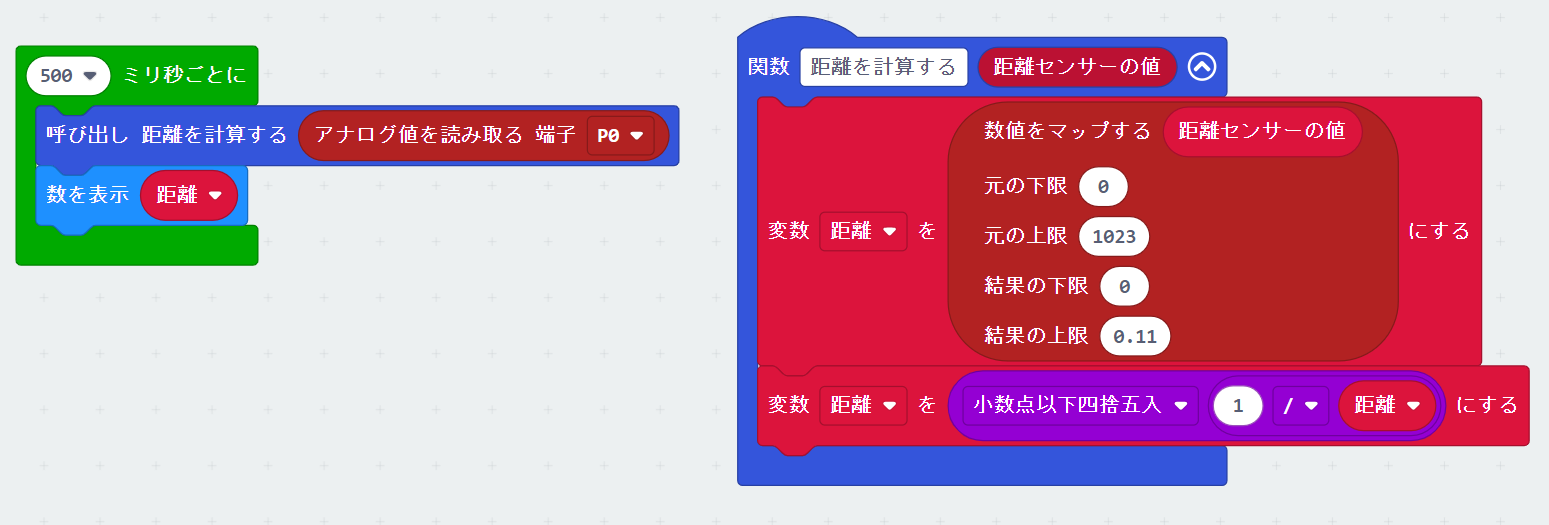
次のプログラムでは、センサーの値をもとに距離(cm)を算出して、micro:bitのLED画面に表示してみました。
プログラムURL:https://makecode.microbit.org/_cDpFcTevjfkD
※こちら画面のプログラムをMakeCodeで開く方法はチュートリアルを確認してください。
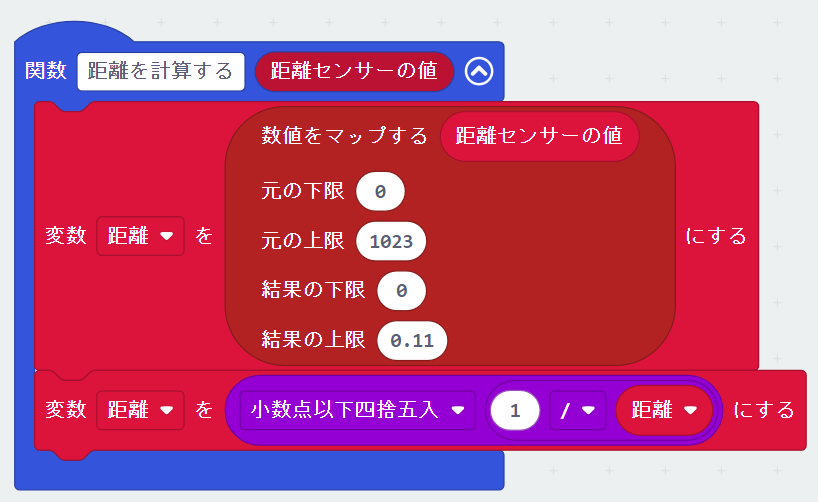 距離を計算するブロック群を関数「距離を計算する」にまとめました。関数についてはチュートリアルを参考にしてください:
距離を計算するブロック群を関数「距離を計算する」にまとめました。関数についてはチュートリアルを参考にしてください: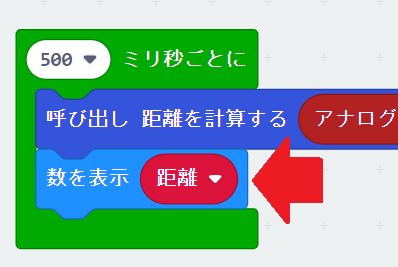 算出した距離は、変数「距離」に保存しています。変数についてはチュートリアルを参考にしてください:
算出した距離は、変数「距離」に保存しています。変数についてはチュートリアルを参考にしてください: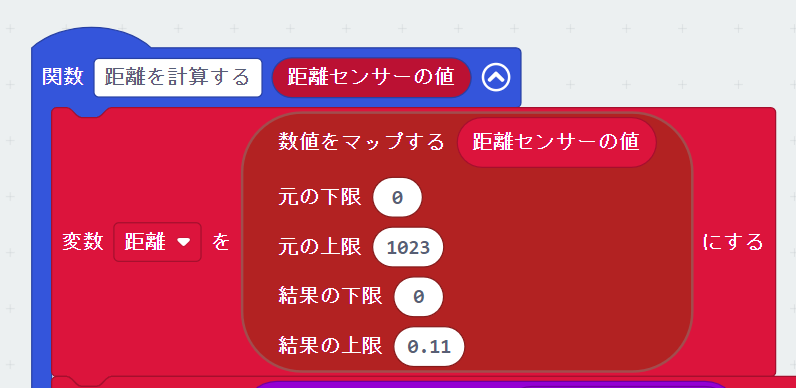 距離の計算で「数値をマップする」ブロックを使いました。「数値をマップする」ブロックについてはチュートリアルを参考にしてください:
距離の計算で「数値をマップする」ブロックを使いました。「数値をマップする」ブロックについてはチュートリアルを参考にしてください: